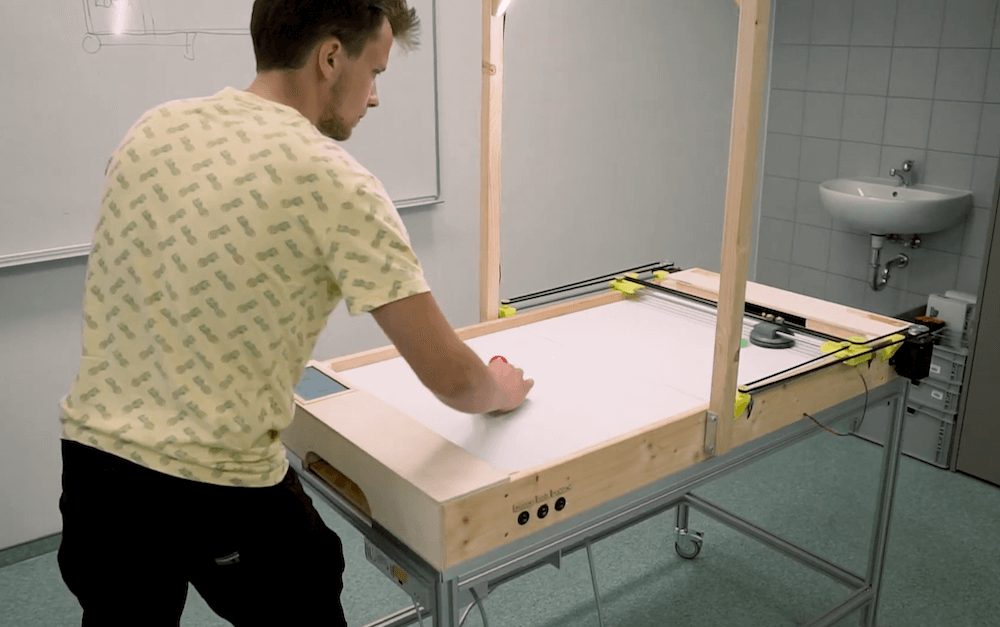
Air hockey is normally a two-player affair, but not for this student-built robot. The table features a designated human goal with a touchscreen GUI for settings and control. The second goal is guarded by an autonomous striker, attached to a pair of steppers using a drive belt arrangement.
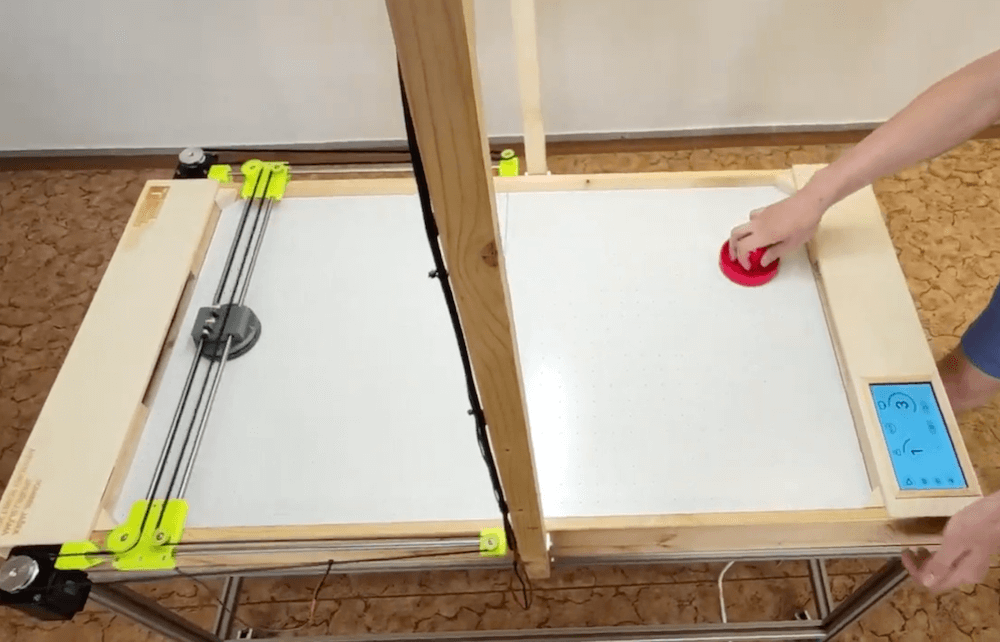
The robotic device analyzes the puck position with an overhead camera and a Raspberry Pi, which passes commands to an Arduino Micro over serial. The Arduino then controls the stepper movements via driver modules, as well as a solenoid to pop the puck out of the robot’s goal on the rare occasion it misses a block.
You can see more on the build in the two videos below!
No comments:
Post a Comment