
Self-propelling robots come in a whole host of shapes, sizes, and capabilities, with some being able to fly while other can walk on just a couple or many legs. But YouTuber James Bruton wanted to innovate on this concept even further by designing and building a robot that mimics an earthworm through extending and contracting segments at certain times to slowly inch along the ground. This class of motion is called peristalsis, and it works by constricting a ring of muscles to propagate material, such as in the case of the digestive tract, or to move an entire body.
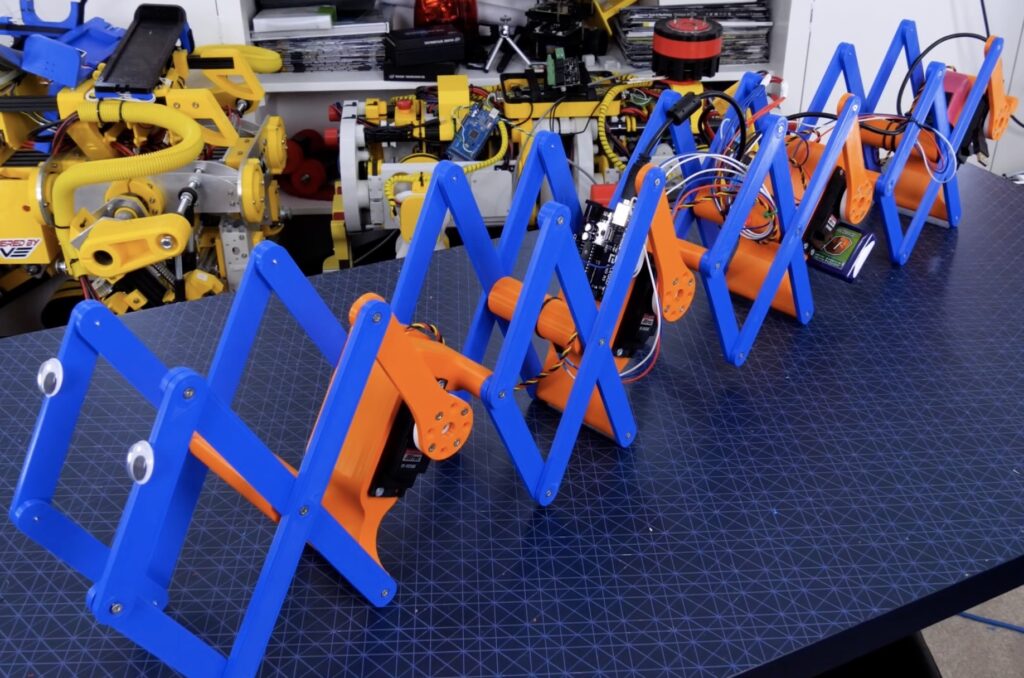
For Bruton’s first prototype, he went with four identical segments that each contain a single linear actuator which pushes or pulls within a scissor mechanism to move the segment. The actuators were then connected to an Arduino Uno that is responsible for sending pulses that dictate the extent of motion in a series. Although it worked at least somewhat, this initial design proved far too slow, thus leading to a redesign.
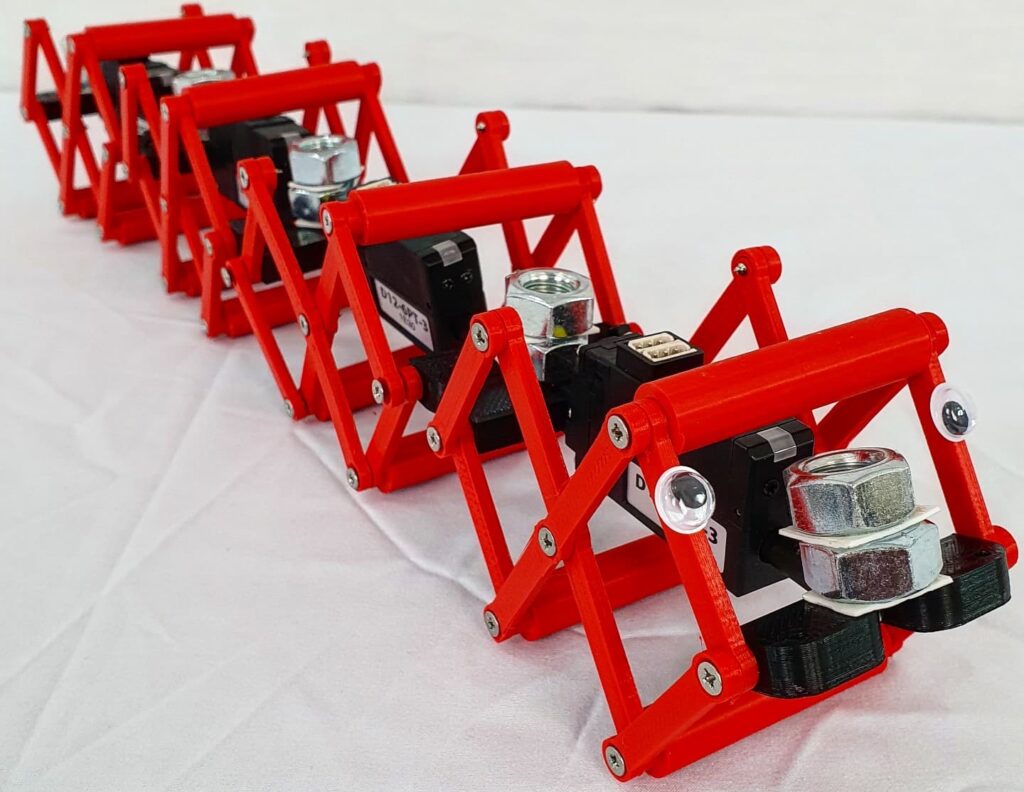
In this next iteration, each segment houses a powerful servo motor at the end of a scissor mechanism that rotates to extend or contract the segment. This way, the worm can raise up, fall further away, and pull the rest of the body along, akin to an inchworm.
For more details on the project, you can watch Bruton’s video or check out his GitHub repository here.
The post James Bruton built a robot that moves like an earthworm appeared first on Arduino Blog.
No comments:
Post a Comment